这篇教程OpenCV-Python实现多模板匹配写得很实用,希望能帮到您。
模板匹配的作用在图像识别领域作用可大了。那什么是模板匹配? 模板匹配,就是在一幅图像中寻找另一幅模板图像最匹配(也就是最相似)的部分的技术。
多模板匹配在上一篇的实战中,我们通过人物眼睛的子图,找出了其在图像中出现位置。但是,有些情况下,并不仅仅只有一次,比如我们讲解傅里叶变换时,曾介绍一张草原的狮子图。如果匹配某个草,可能单个图像内会有很多,这个时候就要找出多个匹配结果。 而函数cv2.minMaxLoc()仅仅能找出最值,无法给出所有匹配区域的位置信息。所以,要想匹配多个结果,就需要进行如下4个步骤:
获取匹配位置的集合首先,Numpy库中的函数where()能够获取模板匹配位置的集合。对于不同的输入,其返回值是不同的。 - 当输入是一维数组时,返回值是一维索引,只是一组索引数组。
- 当输入是二维数组时,返回的是匹配值的位置索引,因此会有两组索引数组表示返回值的位置。
比如,我们的灰度图像一般都是二维数组。下面,我们来查找一个二维数组中,值大于8的元素索引: import numpy as npimg = np.array([[2, 4, 6, 8, 10], [9, 60, 10, 30, 4], [55, 21, 11, 7, 5]])result = np.where(img > 5)print(result) 运行之后,控制台会输出如下内容:

如果你对Numpy不是很了解的化。下面博主在将数据转换以下,基本上都能看懂了。转换之后,格式如下:
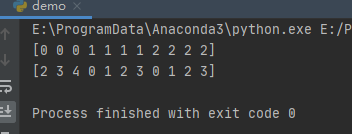
第一行为大于5的值的X坐标,第二行为大于5的值的Y坐标。那么上面大于5的数组索引为:[0,2],[0,3],[0,4],[1,0],[1,1],[1,2],[1,3],[2,0],[2,1],[2,2],[2,3]。你可以回溯对比看看是不是一致的。 通过np.where()函数可以找出在cv2.matchTemplate()函数的返回值中,哪些位置上的值是大于阈值threshold的。具体操作代码如下: loc=np.where(res>threshold)
循环因为我们找到的原图对应的模板图像不止一个,要处理多个值,肯定会用到循环。因此,在获取匹配值的索引后,可以采用如下语句遍历所有匹配的位置,对这些位置做标记:
在循环中使用zip()函数zip()用可迭代的对象作为参数,将对象中对应的元素打包成一个个元组,然后返回由这些元组组成的列表。 例如,我们获取的索引为x,y,z。下面我们使用zip()将它们打包成元组。代码如下: import cv2import numpy as npimport matplotlib.pyplot as pltimg = np.array([[2, 4, 6, 8, 10], [9, 60, 10, 30, 4], [55, 21, 11, 7, 5]])result = np.where(img > 5)for i in zip(*result): print(i) 这里我们还是使用上面的值,输出结果如下:
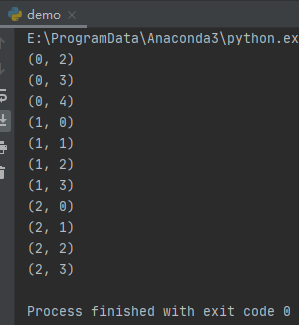
这里自动将我们刚才满足条件的索引打包成了元素格式。是不是比刚才的控制台输出结果更加的直观呢?
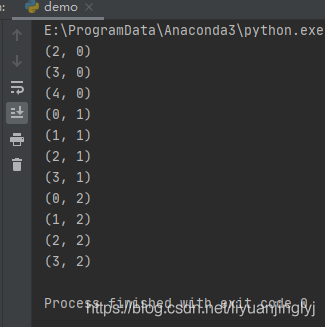
替换坐标我们上面得到的结果是符合条件的索引:(行号,列号),但我们需要绘制匹配位置的矩形,需要的是(列号,行号)。 所以,在使用cv2.rectangle()绘制矩形前,要先将函数numpy.where()得到的位置索引行列互换,行列互换可以通过如下代码实现: import numpy as npimg = np.array([[2, 4, 6, 8, 10], [9, 60, 10, 30, 4], [55, 21, 11, 7, 5]])result = np.where(img > 5)for i in zip(*result[::-1]): print(i) 运行之后,输出结果如下:
实战多模板匹配既然我们已经了解了标记绘制多个模板位置的4个步骤。下面,我们直接将上面的代码整理以下,即可完成多模板的匹配。具体代码如下所示: import cv2import numpy as npimport matplotlib.pyplot as pltimg = cv2.imread("34.jpg", 0)template = cv2.imread("4_1.jpg", 0)w, h = template.shape[::-1]res = cv2.matchTemplate(img, template, cv2.TM_CCOEFF_NORMED)threshold = 0.9loc = np.where(res >= 0.9)for i in zip(*loc[::-1]): cv2.rectangle(img, i, (i[0] + w, i[1] + h), 255, 1)plt.imshow(img, cmap="gray")plt.axis("off")plt.show()这里的代码与上面4个步骤一摸一样,具体就不做过多的讲解了。运行之后,多个模板也就匹配完成。

附录: 模板图 
原图 
实例:基于opencv的多目标模板匹配利用opencv进行多目标模板匹配,只要是利用其matchTemplate函数,但在多目标(这里是讨论目标图片中不同大小模板的匹配),以下贴出代码和图片,供大家参考: #include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <iostream>#include <math.h>using namespace std;using namespace cv;Point getNextMinLoc(Mat &result, Point minLoc, int maxValue, int templatW, int templatH);int main(void){ Mat src = imread("1_2.png"); Mat srcCopy = src.clone(); Mat temp = imread("1_4.png"); Mat result; if (src.empty() || temp.empty()) { cout << "打开图片失败" << endl; return 0; } vector<Mat> templat; vector<float> minV; vector<Point> minL; int srcW, srcH, templatW, templatH, resultH, resultW; srcW = src.cols; srcH = src.rows; templat.push_back(temp); double minValue, maxValue; Point minLoc, maxLoc; for (int i=0;i<10;i++) { cout << i << ": "; templatW = templat[i].cols; templatH = templat[i].rows; if (srcW < templatW || srcH < templatH) { cout << "模板不能比原图大" << endl; return 0; } resultW = srcW - templatW + 1; resultH = srcH - templatH + 1; result.create(Size(resultW, resultH), CV_32FC1); matchTemplate(src, templat[i], result, CV_TM_SQDIFF_NORMED); minMaxLoc(result, &minValue, &maxValue, &minLoc, &maxLoc); cout << "min1: " << minValue << endl; if (minValue<=0.070055) { rectangle(srcCopy, minLoc, Point(minLoc.x + templatW, minLoc.y + templatH), Scalar(0, 0, 255), 2, 8, 0); Point new_minLoc; new_minLoc = getNextMinLoc(result, minLoc, maxValue, templatW, templatH); float *data = result.ptr<float>(new_minLoc.y); cout << "min2: " << data[new_minLoc.x] << " "; if (data[new_minLoc.x]<=0.5) { cout << "进这个函数了:" << i << ":" << new_minLoc.x; cout << " " << new_minLoc.y; rectangle(srcCopy, new_minLoc, Point(new_minLoc.x + templatW, new_minLoc.y + templatH), Scalar(0, 255, 0), 2, 8, 0); new_minLoc = getNextMinLoc(result, new_minLoc, maxValue, templatW, templatH); } float *data1 = result.ptr<float>(new_minLoc.y); cout << "min3: " << data1[new_minLoc.x] << " " << endl; if (data1[new_minLoc.x] <= 0.4) { rectangle(srcCopy, new_minLoc, Point(new_minLoc.x + templatW, new_minLoc.y + templatH), Scalar(255, 0, 0), 2, 8, 0); } } cout << "#" << endl; Mat temp_templat; resize(templat[i], temp_templat, Size(templat[i].cols / 1.1, templat[i].rows / 1.1)); templat.push_back(temp_templat); } imshow("结果", srcCopy); waitKey(0); return 0;}Point getNextMinLoc(Mat &result, Point minLoc, int maxValue, int templatW, int templatH){ //imshow("result", result); //cout << "maxvalue: " << maxValue << endl; int startX = minLoc.x - templatW / 3; int startY = minLoc.y - templatH / 3; int endX = minLoc.x + templatW / 3; int endY = minLoc.y + templatH / 3; if (startX < 0 || startY < 0) { startX = 0; startY = 0; } if (endX > result.cols - 1 || endY > result.rows - 1) { endX = result.cols - 1; endY = result.rows - 1; } int y, x; for (y = startY; y < endY; y++) { for (x = startX; x < endX; x++) { float *data = result.ptr<float>(y); data[x] = maxValue; } } double new_minValue, new_maxValue; Point new_minLoc, new_maxLoc; minMaxLoc(result, &new_minValue, &new_maxValue, &new_minLoc, &new_maxLoc); //imshow("result_end", result); return new_minLoc;}

以下是结果图: 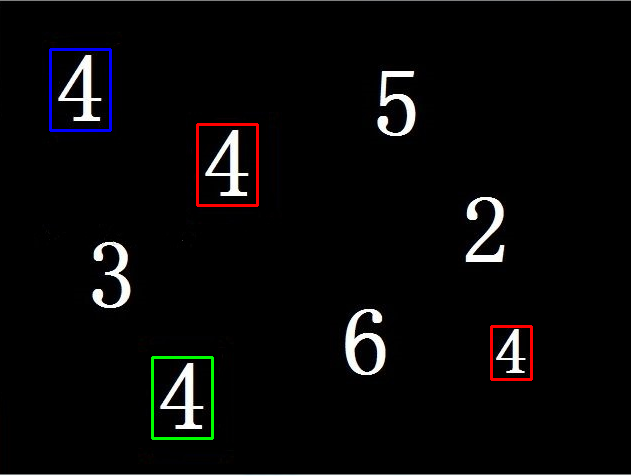
到此这篇关于OpenCV-Python实现多模板匹配的文章就介绍到这了,更多相关OpenCV 多模板匹配内容请搜索51zixue.net以前的文章或继续浏览下面的相关文章希望大家以后多多支持51zixue.net!
OpenCV-Python使用分水岭算法实现图像的分割与提取
OpenCV-Python实现凸包的获取 |









