今天想重新跑一下之前的maskrcnn的目标检测代码,然后到最后一步运行程序的时候报错了,运行代码如下:
demo$ sudo python3 webcam.py --min-image-size 800
报错如下:

感觉莫名其妙的错误,汗(⊙﹏⊙)b!网上查了相关的解决方案,一条解决方案是输入如下代码:
$ sudo apt-get remove libqt5x11extras5
按了回车之后,出现如下提示:
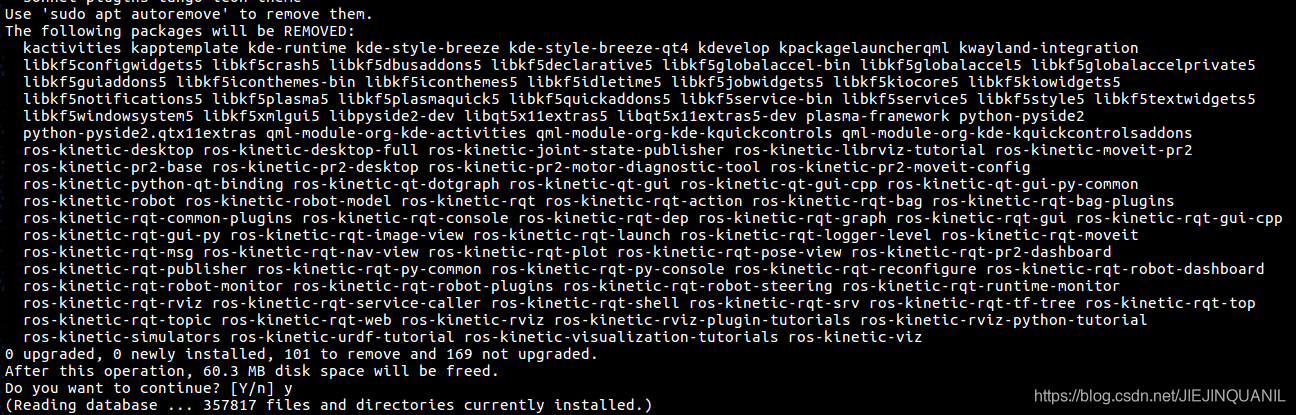
这些是啥意思????难不成要把之前安装的ROS-Kinetic给卸载掉?我很慌啊。不过心里想着缺是如果真的卸载了大不了重装了,于是选择了yes继续卸载。卸载完成之后,我重新执行了maskrcnn的检测图片的代码:
demo$ sudo python3 webcam.py --min-image-size 800
这次能够正常运行出检测的结果图片了,好歹算是解决了一个问题了!
然后分别打开了三个终端,执行如下指令:
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
成功地看到小乌龟出来了!并能够用键盘控制小乌龟移动!也就是刚才的卸载操作并没有卸载掉ROS-Kinetic,只是把和libqt5x11extras5相关的给删掉了。虚惊一场~