’βΤΣΫΧ≥ΧOpenCV+MediaPipe Βœ÷ ÷≤ΩΙΊΦϋΒψ Ε±π–¥ΒΟΚή Β”ΟΘ§œΘΆϊΡήΑοΒΫΡζΓΘ
Ω… ”Μ·Η®÷ζΚ· ΐ‘Ύœ¬ΟφΒΡ¥ζ¬κΒΡΉΔ ΆΡΎ”–¥σ÷¬ΒΡ≤ΌΉς Μυ±Ψ≤ΌΉς”κ«ΑΟφΒΡ»ΥΝ≥Φλ≤βΒΡ≤ΌΉςœύΥΤΘ§‘ωΦ”ΝΥΩ… ”Μ·ΒΡΗ®÷ζΚ· ΐ import matplotlib.pyplot as plt# Ι”ΟipythonΒΡΡßΖ®ΖΫΖ®Θ§ΫΪΜφ÷Τ≥ωΒΡΆΦœώ÷±Ϋ”«Ε»κ‘ΎnotebookΒΞ‘ΣΗώ÷–import cv2# Ε®“εΩ… ”Μ·ΆΦœώΚ· ΐdef look_img(img): '''opencvΕΝ»κΆΦœώΗώ ΫΈΣBGRΘ§matplotlibΩ… ”Μ·Ηώ ΫΈΣRGBΘ§“ρ¥Υ–ηΫΪBGRΉΣRGB''' img_RGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) plt.imshow(img_RGB) plt.show()#Βς”Ο…ψœώΆΖ≈Ρ’’time.sleep(2) # ‘Υ––±Ψ¥ζ¬κΚσΝΫΟκ≈Ρ’’# Μώ»Γ…ψœώΆΖΘ§0ΈΣΒγΡ‘Ρ§»œ…ψœώΆΖΘ§1ΈΣΆβΫ”…ψœώΆΖcap = cv2.VideoCapture(0)# ¥”…ψœώΆΖ≤ΕΜώ“Μ÷ΓΜ≠Οφsuccess, image = cap.read()# ΙΊ±’…ψœώΆΖcap.release()# ΙΊ±’ΆΦœώ¥ΑΩΎcv2.destroyAllWindows()cv2.imwrite('photo.jpg', image)#Βς”Ο…ψœώΆΖ≈Ρ ”ΤΒimport cv2import time# Ε®“ε÷π÷Γ¥ΠάμΚ· ΐΘ§Ω…≤ΜΫχ––»ΈΚΈ¥ΠάμΘ§÷±Ϋ”ΫΪ…ψœώΆΖ≤ΕΜώΒΡΜ≠Οφ–¥»κ ”ΤΒ÷Γdef process_frame(img): return imgoutput_name = 'record_video.mp4'# Μώ»Γ…ψœώΆΖΘ§¥Ϊ»κ0±μ ΨΜώ»ΓœΒΆ≥Ρ§»œ…ψœώΆΖcap = cv2.VideoCapture(0)# ¥ρΩΣcapcap.open(0)frame_size = (cap.get(cv2.CAP_PROP_FRAME_WIDTH), cap.get(cv2.CAP_PROP_FRAME_HEIGHT))fourcc = cv2.VideoWriter_fourcc(*'mp4v')fps = cap.get(cv2.CAP_PROP_FPS)out = cv2.VideoWriter(output_name, fourcc, fps, (int(frame_size[0]), int(frame_size[1])))# Έόœό―≠ΜΖΘ§÷±ΒΫbreak±Μ¥ΞΖΔwhile cap.isOpened(): # Μώ»ΓΜ≠Οφ success, frame = cap.read() if not success: break # Ε‘≤ΕΜώΒΡ÷ΓΫχ––ΆΦœώ¥Πάμ frame = process_frame(frame) ## ΫΪ÷Γ–¥»κ ”ΤΒΈΡΦΰ÷– out.write(frame) # ’Ι Ψ¥ΠάμΚσΒΡ»ΐΆ®ΒάΆΦœώ cv2.imshow('press q to break', frame) if cv2.waitKey(1) in [ord('q'), 27]: # Α¥Φϋ≈Χ…œΒΡqΜρescΆΥ≥ωΘ®‘Ύ”ΔΈΡ δ»κΖ®œ¬Θ© break# ΙΊ±’ΆΦœώ¥ΑΩΎcv2.destroyAllWindows()out.release()# ΙΊ±’…ψœώΆΖcap.release()print(' ”ΤΒ“―±Θ¥φ', output_name)
ΒΞ’≈ΆΦΤ§import cv2 as cvimport mediapipe as mpimport tqdmimport timeimport matplotlib.pyplot as pltdef look_img(img): img_RGB=cv.cvtColor(img,cv.COLOR_BGR2RGB) plt.imshow(img_RGB) plt.show()# ÷≤ΩΙΊΦϋΒψΦλ≤βΡΘ–Άmp_hand=mp.solutions.hands# ΒΦ»κΡΘ–Άhands=mp_hand.Hands(static_image_mode=False, max_num_hands=5, min_detection_confidence=0.3, min_tracking_confidence=0.3 )# ΒΦ»κΜφΆΦΚ· ΐmpDraw=mp.solutions.drawing_utilsimg=cv.imread('hand2.png')# look_img(img)img_RGB=cv.cvtColor(img,cv.COLOR_BGR2RGB)results=hands.process(img_RGB)if results.multi_hand_landmarks: for hand_idx in range(len(results.multi_hand_landmarks)): hand_21=results.multi_hand_landmarks[hand_idx] mpDraw.draw_landmarks(img, hand_21, mp_hand.HAND_CONNECTIONS) # Ω… ”Μ·look_img(img)cv.imwrite('hands2.jpg',img)# ‘Ύ»ΐΈ§Ήχ±ξœΒ÷–Ω… ”Μ·Υς“ΐΈΣ0ΒΡ ÷mpDraw.plot_landmarks(results.multi_hand_landmarks[0], mp_
…ψœώΆΖΦλ≤βimport cv2# mediapipe»ΥΙΛ÷«ΡήΙΛΨΏΑϋimport mediapipe as mp# ΫχΕ»ΧθΩβfrom tqdm import tqdm# ±ΦδΩβimport time# ΒΦ»κΡΘ–Ά# ΒΦ»κsolutionmp_hands = mp.solutions.hands# ΒΦ»κΡΘ–Άhands = mp_hands.Hands(static_image_mode=False, # «Ψ≤Χ§ΆΦΤ§ΜΙ «Ν§–χ ”ΤΒ÷Γ max_num_hands=2, # ΉνΕύΦλ≤βΦΗ÷Μ ÷ min_detection_confidence=0.7, # ÷Ο–≈Ε»ψ–÷Β min_tracking_confidence=0.5) # ΉΖΉΌψ–÷Β# ΒΦ»κΜφΆΦΚ· ΐmpDraw = mp.solutions.drawing_utils# ¥ΠάμΒΞ÷ΓΚ· ΐ# ¥Πάμ÷ΓΚ· ΐdef process_frame(img): # Υ°ΤΫΨΒœώΖ≠ΉΣΆΦœώΘ§ ΙΆΦ÷–Ήσ”“ ÷”κ’φ ΒΉσ”“ ÷Ε‘”Π # ≤Έ ΐ 1ΘΚΥ°ΤΫΖ≠ΉΣΘ§0ΘΚ ζ÷±Ζ≠ΉΣΘ§-1ΘΚΥ°ΤΫΚΆ ζ÷±ΕΦΖ≠ΉΣ img = cv2.flip(img, 1) # BGRΉΣRGB img_RGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # ΫΪRGBΆΦœώ δ»κΡΘ–ΆΘ§Μώ»Γ‘Λ≤βΫαΙϊ results = hands.process(img_RGB) if results.multi_hand_landmarks: # »γΙϊ”–Φλ≤βΒΫ ÷ # ±ιάζΟΩ“Μ÷ΜΦλ≤β≥ωΒΡ ÷ for hand_idx in range(len(results.multi_hand_landmarks)): hand_21 = results.multi_hand_landmarks[hand_idx] # Μώ»ΓΗΟ ÷ΒΡΥυ”–ΙΊΦϋΒψΉχ±ξ mpDraw.draw_landmarks(img, hand_21, mp_hands.HAND_CONNECTIONS) # Ω… ”Μ· # ‘Ύ»ΐΈ§Ήχ±ξœΒ÷–Ω… ”Μ·Υς“ΐΈΣ0ΒΡ ÷ # mpDraw.plot_landmarks(results.multi_hand_landmarks[0], mp_hands.HAND_CONNECTIONS) return img# ΒΦ»κopencv-pythonimport cv2import time# Μώ»Γ…ψœώΆΖΘ§¥Ϊ»κ0±μ ΨΜώ»ΓœΒΆ≥Ρ§»œ…ψœώΆΖcap = cv2.VideoCapture(1)# ¥ρΩΣcapcap.open(0)# Έόœό―≠ΜΖΘ§÷±ΒΫbreak±Μ¥ΞΖΔwhile cap.isOpened(): # Μώ»ΓΜ≠Οφ success, frame = cap.read() if not success: print('Error') break ## !!!¥Πάμ÷ΓΚ· ΐ frame = process_frame(frame) # ’Ι Ψ¥ΠάμΚσΒΡ»ΐΆ®ΒάΆΦœώ cv2.imshow('my_window', frame) if cv2.waitKey(1) in [ord('q'), 27]: # Α¥Φϋ≈Χ…œΒΡqΜρescΆΥ≥ωΘ®‘Ύ”ΔΈΡ δ»κΖ®œ¬Θ© break# ΙΊ±’…ψœώΆΖcap.release()# ΙΊ±’ΆΦœώ¥ΑΩΎcv2.destroyAllWindows()
ΗΡ±δΙΊΦϋΒψ ΐΨίΧΊ’ςimport cv2# mediapipe»ΥΙΛ÷«ΡήΙΛΨΏΑϋimport mediapipe as mp# ΫχΕ»ΧθΩβfrom tqdm import tqdm# ±ΦδΩβimport time# ΒΦ»κsolutionmp_hands = mp.solutions.hands# ΒΦ»κΡΘ–Άhands = mp_hands.Hands(static_image_mode=False, # «Ψ≤Χ§ΆΦΤ§ΜΙ «Ν§–χ ”ΤΒ÷Γ max_num_hands=2, # ΉνΕύΦλ≤βΦΗ÷Μ ÷ min_detection_confidence=0.7, # ÷Ο–≈Ε»ψ–÷Β min_tracking_confidence=0.5) # ΉΖΉΌψ–÷Β# ΒΦ»κΜφΆΦΚ· ΐmpDraw = mp.solutions.drawing_utilsdef process_frame(img): # Φ«¬ΦΗΟ÷ΓΩΣ Φ¥ΠάμΒΡ ±Φδ start_time = time.time() # Μώ»ΓΆΦœώΩμΗΏ h, w = img.shape[0], img.shape[1] # Υ°ΤΫΨΒœώΖ≠ΉΣΆΦœώΘ§ ΙΆΦ÷–Ήσ”“ ÷”κ’φ ΒΉσ”“ ÷Ε‘”Π # ≤Έ ΐ 1ΘΚΥ°ΤΫΖ≠ΉΣΘ§0ΘΚ ζ÷±Ζ≠ΉΣΘ§-1ΘΚΥ°ΤΫΚΆ ζ÷±ΕΦΖ≠ΉΣ img = cv2.flip(img, 1) # BGRΉΣRGB img_RGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # ΫΪRGBΆΦœώ δ»κΡΘ–ΆΘ§Μώ»Γ‘Λ≤βΫαΙϊ results = hands.process(img_RGB) if results.multi_hand_landmarks: # »γΙϊ”–Φλ≤βΒΫ ÷ handness_str = '' index_finger_tip_str = '' for hand_idx in range(len(results.multi_hand_landmarks)): # Μώ»ΓΗΟ ÷ΒΡ21ΗωΙΊΦϋΒψΉχ±ξ hand_21 = results.multi_hand_landmarks[hand_idx] # Ω… ”Μ·ΙΊΦϋΒψΦΑΙ«ΦήΝ§œΏ mpDraw.draw_landmarks(img, hand_21, mp_hands.HAND_CONNECTIONS) # Φ«¬ΦΉσ”“ ÷–≈œΔ temp_handness = results.multi_handedness[hand_idx].classification[0].label handness_str += '{}:{} '.format(hand_idx, temp_handness) # Μώ»Γ ÷ΆσΗυ≤Ω…νΕ»Ήχ±ξ cz0 = hand_21.landmark[0].z for i in range(21): # ±ιάζΗΟ ÷ΒΡ21ΗωΙΊΦϋΒψ # Μώ»Γ3DΉχ±ξ cx = int(hand_21.landmark[i].x * w) cy = int(hand_21.landmark[i].y * h) cz = hand_21.landmark[i].z depth_z = cz0 - cz # ”Ο‘≤ΒΡΑκΨΕΖ¥”≥…νΕ»¥σ–Γ radius = max(int(6 * (1 + depth_z * 5)), 0) if i == 0: # ÷Άσ img = cv2.circle(img, (cx, cy), radius, (0, 0, 255), -1) if i == 8: # ≥÷Η÷ΗΦβ img = cv2.circle(img, (cx, cy), radius, (193, 182, 255), -1) # ΫΪœύΕ‘”Ύ ÷ΆσΒΡ…νΕ»Ψύάκœ‘ Ψ‘ΎΜ≠Οφ÷– index_finger_tip_str += '{}:{:.2f} '.format(hand_idx, depth_z) if i in [1, 5, 9, 13, 17]: # ÷ΗΗυ img = cv2.circle(img, (cx, cy), radius, (16, 144, 247), -1) if i in [2, 6, 10, 14, 18]: # ΒΎ“Μ÷ΗΫΎ img = cv2.circle(img, (cx, cy), radius, (1, 240, 255), -1) if i in [3, 7, 11, 15, 19]: # ΒΎΕΰ÷ΗΫΎ img = cv2.circle(img, (cx, cy), radius, (140, 47, 240), -1) if i in [4, 12, 16, 20]: # ÷ΗΦβΘ®≥ΐ ≥÷Η÷ΗΦβΘ© img = cv2.circle(img, (cx, cy), radius, (223, 155, 60), -1) scaler = 1 img = cv2.putText(img, handness_str, (25 * scaler, 100 * scaler), cv2.FONT_HERSHEY_SIMPLEX, 1.25 * scaler, (255, 0, 255), 2 * scaler) img = cv2.putText(img, index_finger_tip_str, (25 * scaler, 150 * scaler), cv2.FONT_HERSHEY_SIMPLEX, 1.25 * scaler, (255, 0, 255), 2 * scaler) # Φ«¬ΦΗΟ÷Γ¥ΠάμΆξ±œΒΡ ±Φδ end_time = time.time() # ΦΤΥψΟΩΟκ¥ΠάμΆΦœώ÷Γ ΐFPS FPS = 1 / (end_time - start_time) # ‘ΎΆΦœώ…œ–¥FPS ΐ÷ΒΘ§≤Έ ΐ“ά¥ΈΈΣΘΚΆΦΤ§Θ§ΧμΦ”ΒΡΈΡΉ÷Θ§Ήσ…œΫ«Ήχ±ξΘ§Ή÷ΧεΘ§Ή÷Χε¥σ–ΓΘ§―’…ΪΘ§Ή÷Χε¥÷œΗ img = cv2.putText(img, 'FPS ' + str(int(FPS)), (25 * scaler, 50 * scaler), cv2.FONT_HERSHEY_SIMPLEX, 1.25 * scaler, (255, 0, 255), 2 * scaler) return img# Μώ»Γ…ψœώΆΖΘ§¥Ϊ»κ0±μ ΨΜώ»ΓœΒΆ≥Ρ§»œ…ψœώΆΖcap = cv2.VideoCapture(0)# ¥ρΩΣcapcap.open(0)# Έόœό―≠ΜΖΘ§÷±ΒΫbreak±Μ¥ΞΖΔwhile cap.isOpened(): # Μώ»ΓΜ≠Οφ success, frame = cap.read() if not success: break frame = process_frame(frame) # ’Ι Ψ¥ΠάμΚσΒΡ»ΐΆ®ΒάΆΦœώ cv2.imshow('my_window', frame) if cv2.waitKey(1) in [ord('q'), 27]: # Α¥Φϋ≈Χ…œΒΡqΜρescΆΥ≥ωΘ®‘Ύ”ΔΈΡ δ»κΖ®œ¬Θ© break# ΙΊ±’…ψœώΆΖcap.release()# ΙΊ±’ΆΦœώ¥ΑΩΎcv2.destroyAllWindows()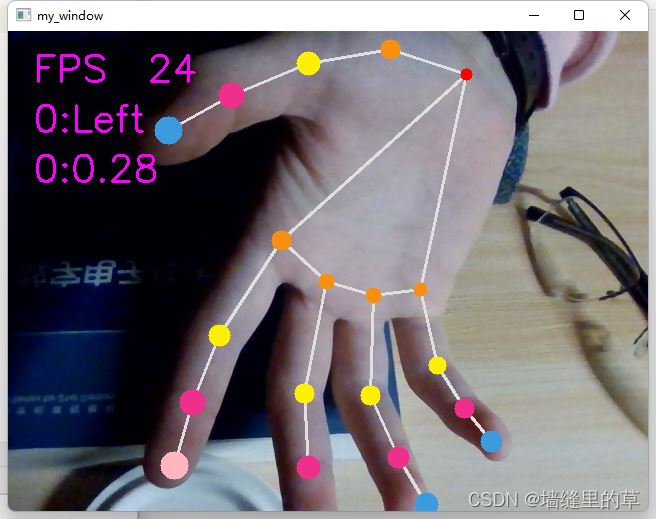
“‘…œΨΆ «OpenCV+MediaPipe Βœ÷ ÷≤ΩΙΊΦϋΒψ Ε±πΒΡœξœΗΡΎ»ίΘ§ΗϋΕύΙΊ”ΎOpenCV MediaPipe ÷≤ΩΙΊΦϋΒψ Ε±πΒΡΉ Νœ«κΙΊΉΔ51zixue.netΤδΥϋœύΙΊΈΡ’¬ΘΓ
pythonΆΦΤ§Ηώ ΫΉΣΜΜΫ≈±Ψ
Python Βœ÷Εύ»ΈΈώΫχ≥Χ Ψάΐ |

