这篇教程使用Python中OpenCV和深度学习进行全面嵌套边缘检测写得很实用,希望能帮到您。
这篇博客将介绍如何使用OpenCV和深度学习应用全面嵌套的边缘检测。并将对图像和视频流应用全面嵌套边缘检测,然后将结果与OpenCV的标准Canny边缘检测器进行比较。 1. 效果图愤怒的小鸟――原始图 VS Canny边缘检测图 VS HED边缘检测图 
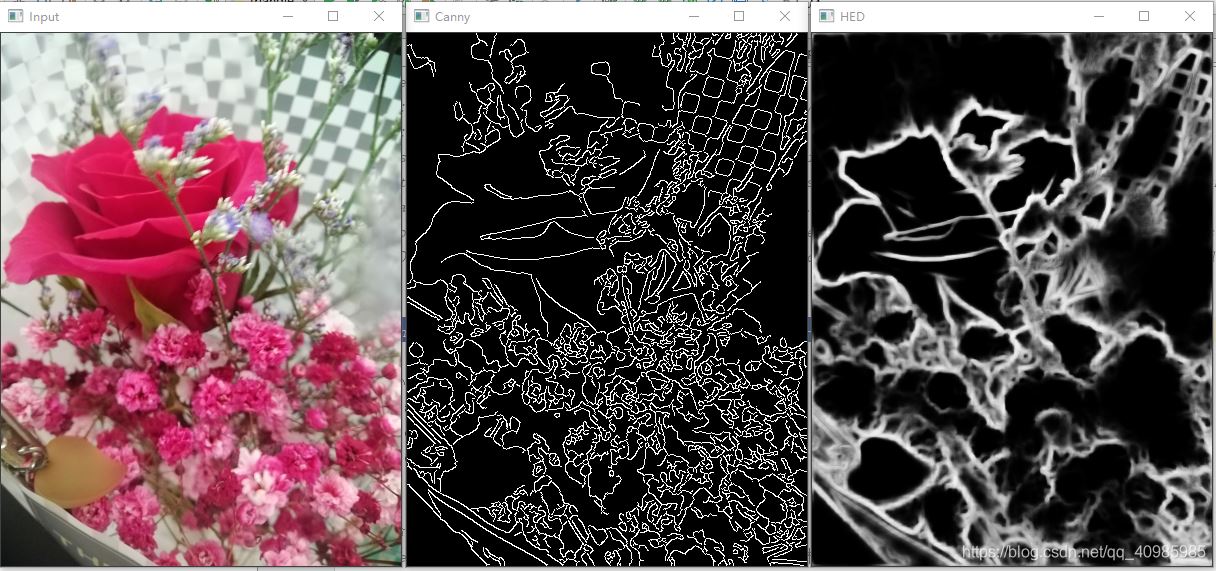
花朵――原始图 VS Canny边缘检测图 VS HED边缘检测图
视频效果图GIF 如下 
2. 全面嵌套边缘检测与Canny边缘检测2.1 Hed与Canny边缘检测对比Holistically-Nested Edge Detection (HED) 全面嵌套边缘检测 Canny Edge Detection Canny边缘检测 OpenCV 利用Canny边缘检测能够找到图像中对象的边界。但是Canny边缘检测器存在一些问题,即: - 需要手动验证(将下部和上值设置为滞后阈值,是一种需要实验和视觉验证的手动过程);
- 不具备通用性(对不同照明条件下捕获的相同图像,适用于一个图像,却不适用于另一个图像);
- 通常需要许多预处理步骤(即转换为灰度,模糊/平滑等),以获得良好的边缘图。
整体嵌套边缘检测(HED)试图通过端到端深神经网络解决Canny边缘检测器的局限性。 该网络接受RGB图像作为输入,然后将边缘图作为输出产生。而且通过HED产生的边缘图在图像中很好的保留了对象边界。 2.2. 项目结构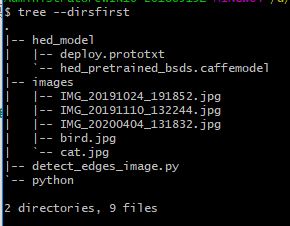
2.3 deploy.prototxt, hed_pretrained_bsds.caffemodel下载执行代码的关键是获取deploy.prototxt, hed_pretrained_bsds.caffemodel
https://github.com/opencv/opencv/blob/master/samples/dnn/edge_detection.py https://github.com/seminar2012/hed - This sample shows how to define custom OpenCV deep learning layers in Python.
- Holistically-Nested Edge Detection (https://arxiv.org/abs/1504.06375) neural network is used as an example model.
- Find a pre-trained model at https://github.com/s9xie/hed. We provide the pretrained model and training/testing code for the edge detection framework Holistically-Nested Edge Detection (HED).
- Please see the Arxiv or ICCV paper for technical details. The pretrained model (fusion-output) gives ODS=.790 and OIS=.808 result on BSDS benchmark dataset.
- Download the pretrained model (56MB) from (http://vcl.ucsd.edu/hed/hed_pretrained_bsds.caffemodel) and place it in examples/hed/ folder.
3. 源码3.1 对图像进行HED检测# USAGE# python detect_edges_image.py --edge-detector hed_model --image images/bird.jpg# 导入必要的包import argparseimport cv2import osimport imutils# 构建命令行参数及解析# --edge-detector Holistically-Nested Edge Detection检测器模型路径# --image 图片路径ap = argparse.ArgumentParser()ap.add_argument("-d", "--edge-detector", type=str, required=True, help="path to OpenCV's deep learning edge detector")ap.add_argument("-i", "--image", type=str, required=True, help="path to input image")args = vars(ap.parse_args())class CropLayer(object): def __init__(self, params, blobs): # 初始化剪切区域开始和结束点的坐标 self.xstart = 0 self.ystart = 0 self.xend = 0 self.yend = 0 # 计算输入图像的体积 def getMemoryShapes(self, inputs): # 剪切类将接收俩个参数 # 剪切第一个输入blob以匹配第二个blob,保持批次和通道数 # 输出输入容积的形状及目标形状 # 提取批量大小及通道数 # 分别提取目标形状的高和宽 (inputShape, targetShape) = (inputs[0], inputs[1]) (batchSize, numChannels) = (inputShape[0], inputShape[1]) (H, W) = (targetShape[2], targetShape[3]) # 计算开始和结束剪切坐标的值 self.xstart = int((inputShape[3] - targetShape[3]) // 2) self.ystart = int((inputShape[2] - targetShape[2]) // 2) self.xend = self.xstart + W self.yend = self.ystart + H # 返回体积,接下来进行实际裁剪 return [[batchSize, numChannels, H, W]] def forward(self, inputs): return [inputs[0][:, :, self.ystart:self.yend, self.xstart:self.xend]]# 从磁盘加载序列化的边缘检测器模型print("[INFO] loading edge detector...")protoPath = os.path.sep.join([args["edge_detector"], "deploy.prototxt"])modelPath = os.path.sep.join([args["edge_detector"], "hed_pretrained_bsds.caffemodel"])net = cv2.dnn.readNetFromCaffe(protoPath, modelPath)# 绑定剪裁类到模型cv2.dnn_registerLayer("Crop", CropLayer)# 加载输入图像,获取其维度image = cv2.imread(args["image"])image = imutils.resize(image, width=400)(H, W) = image.shape[:2]# 转换图像为灰度图,高斯平滑,执行Canny边缘检测print("[INFO] performing Canny edge detection...")gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)blurred = cv2.GaussianBlur(gray, (5, 5), 0)canny = cv2.Canny(blurred, 30, 150)# 根据输入图像为全面的嵌套边缘检测器(Holistically-Nested Edge Detector)构建一个输出blobblob = cv2.dnn.blobFromImage(image, scalefactor=1.0, size=(W, H), mean=(104.00698793, 116.66876762, 122.67891434), swapRB=False, crop=False)# # 设置blob作为网络的输入并执行算法以计算边缘图print("[INFO] performing holistically-nested edge detection...")net.setInput(blob)hed = net.forward()# 调整输出为原始图像尺寸的大小hed = cv2.resize(hed[0, 0], (W, H))# 将图像像素缩回到范围[0,255]并确保类型为“UINT8”hed = (255 * hed).astype("uint8")# 展示HED边缘检测的结果及Canny边缘检测的结果cv2.imshow("Input", image)cv2.imshow("Canny", canny)cv2.imshow("HED", hed)cv2.waitKey(0)3.2 对视频进行HED检测# USAGE 默认使用电脑自带的摄像头# python detect_edges_video.py --edge-detector hed_model# 使用视频文件流# python detect_edges_video.py --edge-detector hed_model --input xl.mp4# 导入必要的包from imutils.video import VideoStreamimport argparseimport imutilsimport time # 此模块允许放置睡眠命令以允许视频流建立和“热身”。import cv2import os# 构建命令行参数及解析# --edge-detector Holistically-Nested Edge Detection检测器模型路径# --input 视频源:网络摄像头,视频文件或其他源。ap = argparse.ArgumentParser()ap.add_argument("-d", "--edge-detector", type=str, required=True, help="path to OpenCV's deep learning edge detector")ap.add_argument("-i", "--input", type=str, help="path to optional input video (webcam will be used otherwise)")args = vars(ap.parse_args())class CropLayer(object): def __init__(self, params, blobs): # 初始化剪切区域开始和结束点的坐标 self.xstart = 0 self.ystart = 0 self.xend = 0 self.yend = 0 # 计算输入图像的体积 def getMemoryShapes(self, inputs): # 剪切类将接收俩个参数 # 剪切第一个输入blob以匹配第二个blob,保持批次和通道数 # 输出输入容积的形状及目标形状 # 提取批量大小及通道数 # 分别提取目标形状的高和宽 (inputShape, targetShape) = (inputs[0], inputs[1]) (batchSize, numChannels) = (inputShape[0], inputShape[1]) (H, W) = (targetShape[2], targetShape[3]) # 计算开始和结束剪切坐标的值 self.xstart = int((inputShape[3] - targetShape[3]) // 2) self.ystart = int((inputShape[2] - targetShape[2]) // 2) self.xend = self.xstart + W self.yend = self.ystart + H # 返回体积,接下来进行实际裁剪 return [[batchSize, numChannels, H, W]] def forward(self, inputs): # 使用派生(x,y)-oordinate来执行裁剪 return [inputs[0][:, :, self.ystart:self.yend, self.xstart:self.xend]]# 初始化视频流,脚本将动态选取使用视频文件流还是网络摄像头流webcam = not args.get("input", False)# 如果未提供视频文件路径,则使用电脑自带摄像头if webcam: print("[INFO] starting video stream...") vs = VideoStream(src=0).start() time.sleep(2.0)# 否则,获取视频文件流指针else: print("[INFO] opening video file...") vs = cv2.VideoCapture(args["input"])# 从磁盘加载序列化的HED检测器模型print("[INFO] loading edge detector...")protoPath = os.path.sep.join([args["edge_detector"], "deploy.prototxt"])modelPath = os.path.sep.join([args["edge_detector"], "hed_pretrained_bsds.caffemodel"])net = cv2.dnn.readNetFromCaffe(protoPath, modelPath)# 将剪裁类注册到模型cv2.dnn_registerLayer("Crop", CropLayer)# 遍历视频流的帧while True: # 获取每一帧,如果使用网络摄像头,获取下一帧 frame = vs.read() frame = frame if webcam else frame[1] # 如果在处理视频文件流,没有获取到帧则代表已经到了文件尾部,则跳出循环 if not webcam and frame is None: break # 等比例缩放帧为宽度500,并获取其维度 frame = imutils.resize(frame, width=300) (H, W) = frame.shape[:2] # 转换灰度图,高斯模糊并执行Canny边缘检测 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (5, 5), 0) canny = cv2.Canny(blurred, 30, 150) # 为HED边缘检测器构建输入帧的blob,设置blob,并执行检测以计算边缘图 blob = cv2.dnn.blobFromImage(frame, scalefactor=1.0, size=(W, H), mean=(104.00698793, 116.66876762, 122.67891434), swapRB=False, crop=False) net.setInput(blob) hed = net.forward() hed = cv2.resize(hed[0, 0], (W, H)) hed = (255 * hed).astype("uint8") # 展示Canny、HED的检测结果 cv2.imshow("Frame", frame) cv2.imshow("Canny", canny) cv2.imshow("HED", hed) key = cv2.waitKey(1) & 0xFF # 按下‘q'键表示退出循环 if key == ord("q"): break# 如果在使用网络摄像头流,则终止相机视频流if webcam: vs.stop()# 否则,释放视频文件流指针else: vs.release()# 关闭所有打开的windowcv2.destroyAllWindows()参考 https://www.pyimagesearch.com/2019/03/04/holistically-nested-edge-detection-with-opencv-and-deep-learning/ 到此这篇关于使用Python中OpenCV和深度学习进行全面嵌套边缘检测的文章就介绍到这了,更多相关OpenCV和深度学习全面嵌套边缘检测内容请搜索51zixue.net以前的文章或继续浏览下面的相关文章希望大家以后多多支持51zixue.net!
python 存储json数据的操作
python排序算法的简单实现方法 |



